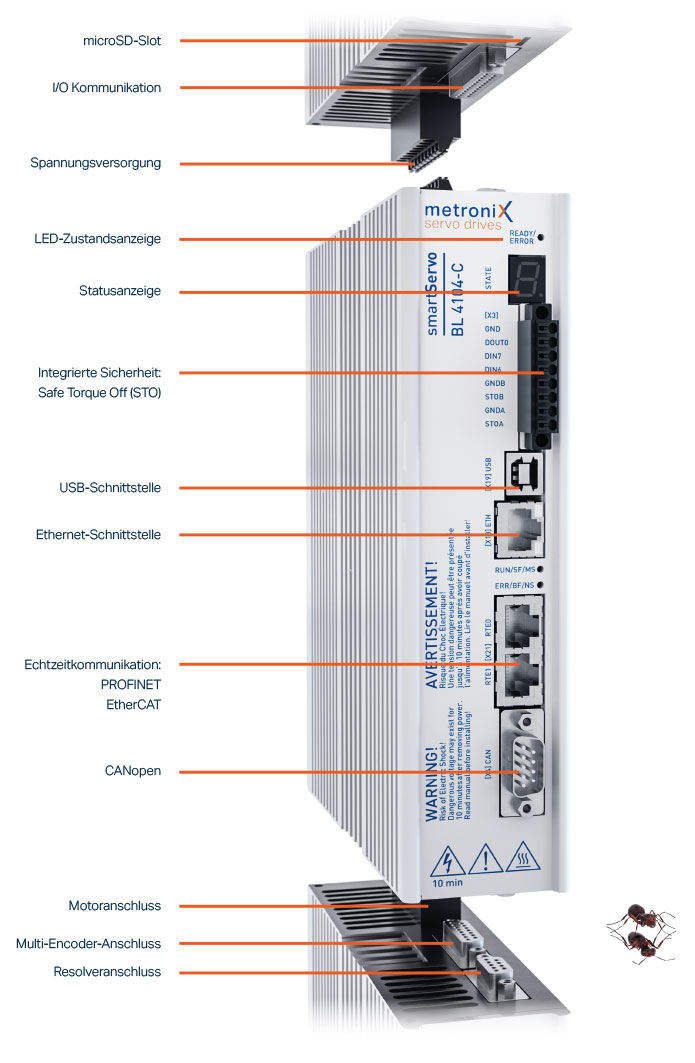
Produktserie smartServo BL 4000-C
BL 4100-C
smartServo BL 4100-C
Einphasiger Servoregler mit Bluetooth
- Höchste Regelgüte und Dynamik Reglerabtastzeit < 32µs
- USB und Ethernet als Parametrierschnittstelle
- Feldbus on board EtherCAT/PROFINET/CANopen/POWERLINK
- Universelle Drehgeberauswertung HIPERFACE®, HIPERFACE DSL®, EnDat 2.2, Resolver, BiSS C, digitale und analoge Inkrementalgeber
- Bluetooth integriert Abfrage des Reglerstatus über Smartphone oder Tablet
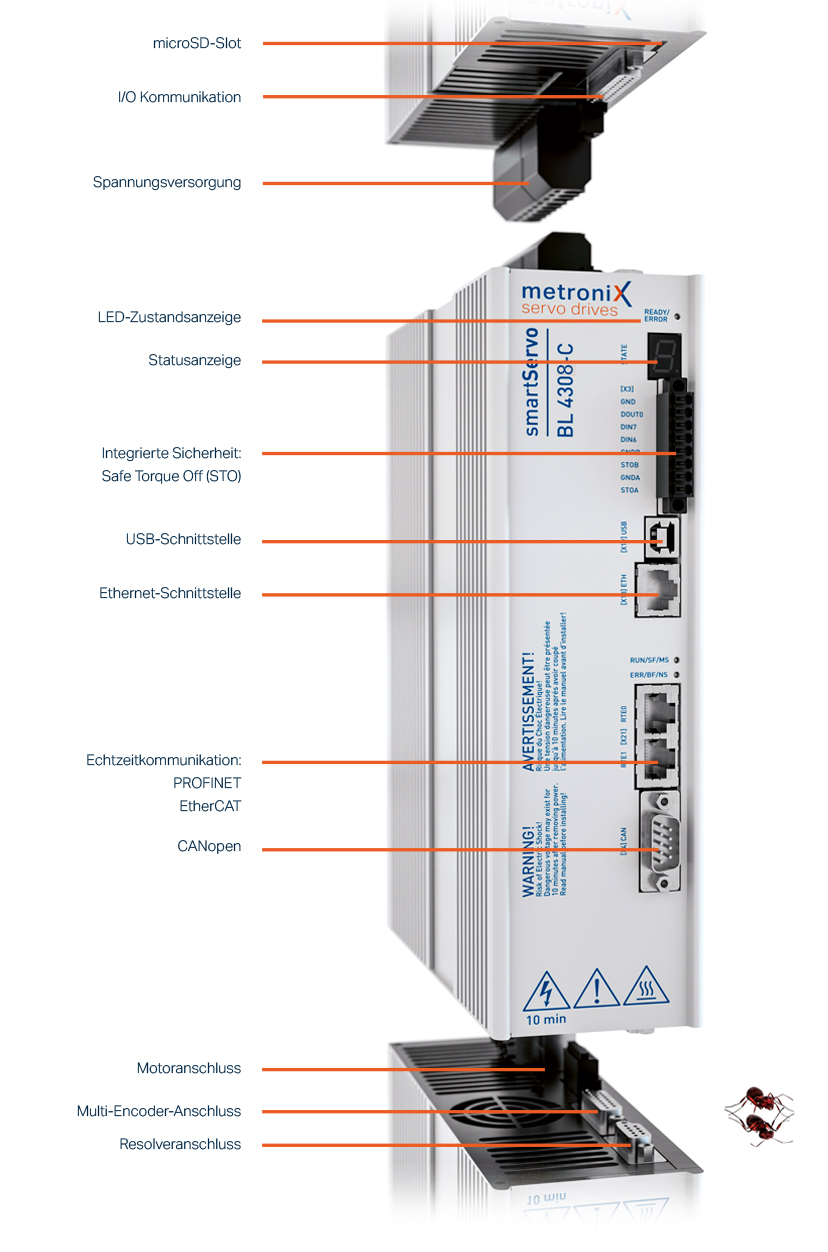
BL 4300-C
smartServo BL 4300-C
Dreiphasiger Servoregler mit Bluetooth
- Höchste Regelgüte und Dynamik Reglerabtastzeit < 32µs
- USB und Ethernet als Parametrierschnittstelle
- Feldbus on board EtherCAT/PROFINET/CANopen/POWERLINK
- Universelle Drehgeberauswertung HIPERFACE®, HIPERFACE DSL®, EnDat 2.2, Resolver, BiSS C, digitale und analoge Inkrementalgeber
- Bluetooth integriert Abfrage des Reglerstatus über Smartphone oder Tablet
Technologie

Technologie-Funktionen
on Board
Zahlreiche integrierte Softwarefunktionen machen die Servoregler smartServo BL 4000-C zu echten Allroundern der Antriebstechnik.
So unterstützen die BL 4000-C Servoregler nicht nur zahlreiche Motorarten und alle gängigen Lagegeber direkt, sondern lassen sich auch über einfache Parametrierung der integrierten Technologiefunktionen äußerst flexibel an eine Vielzahl von Anwendungsaufgaben anpassen. Durch die präzise und hochgenaue Auswertung externer Signale im Antrieb werden dabei kürzestmögliche Taktzeiten erreicht.
Positionierung
Ob linear, ruckfrei oder momentenbegrenzt: Mit der eingebauten Positioniersteuerung lässt sich jede Bewegungsaufgabe einfach realisieren.
Wegprogramm/Verkettung
Alle 256 Positionssätze lassen sich miteinander verketten, um komplexe Positionieraufgaben ohne Steuerung zu lösen. Über digitale Eingänge sind zudem situationsabhängige Verzweigungen möglich.
Fliegende Säge
Durch die Integration der Fliegenden Säge in den Antrieb, lassen sich nicht nur kurze Zykluszeiten, sondern auch extrem hohe Genauigkeiten erreichen.
Elektronisches Getriebe/ Synchronisation
Die lage- oder drehzahlsynchrone Bewegung mehrerer Antriebe mit variablem Getriebeverhältnis ist per Software-Assistent schnell parametriert und einsatzbereit.
Linearmotoren
Spezielle Verfahren zur Kommutierlage- Bestimmung und entsprechende Überwachungsfunktionen ermöglichen den Betrieb von Linearmotoren ohne Kommutierinformationen.
Rundtisch
Zur Verwendung für Rundtisch- Anwendungen stehen mehrere Rundachs-Modi zur Verfügung. Diese lassen sich sowohl mit der Kurvenscheibe als auch mit dem Elektronischen Getriebe kombinieren.
Schaltnocken
Lagetrigger, Rotorpositionstrigger und Schaltnocken in Verbindung mit der Kurvenscheibe lassen sich einfach parametrieren und auf digitale Ausgänge legen.
Connectivity-Optionen
Universelle Schnittstellen-Vielfalt
CANopen
Immer on board ist das seit Jahrzehnten bewährte Feldbussystem CANopen mit dem Antriebsprofil CiA 402. Mit den Betriebsarten Profile Torque Mode, Profile Velocity Mode, Profile Position Mode, Homing Mode und Interpolated Position Mode ist der Servoregler in einer Vielzahl verschiedenster Anwendungen einsetzbar. Einige Hundert Parameter ermöglichen die komplette Konfiguration des Servoreglers über CANopen.

Ethernet
Das integrierte Ethernet-Interface kann über eine UDP/ IP Verbindung z. B. für Fernwartung oder als Feldbusverbindung eingesetzt werden. Dabei ist eine Übertragung von Soll- und Istwerten, eine Fehleranalyse, das Laden und Speichern von Parametersätzen, das Einstellen einzelner Parameter sowie das Anzeigen von Werten über die Oszilloskop-Funktion möglich.

EtherCAT
Alle smartServo BL 4000-C verfügen über das Ethernet-basierte Feldbussystem EtherCAT. Mit dem Applikationsprotokoll CoE (CANopen over EtherCAT) sind alle Betriebsarten und Parameter von CANopen auch unter EtherCAT nutzbar. In Mehrachsanwendungen werden in der Betriebsart „Cyclic synchronous position“ in Verbindung mit Distributed Clocks (DC) selbst bei hohen Zykluszeiten hochsynchrone Bewegungen erreicht, da sich die Servoregler exakt auf den externen Takt aufsynchronisieren.
PROFINET
Das Ethernet-basierte Feldbussystem PROFINET ist ebenfalls bereits grundsätzlich integriert. Basierend auf PROFIdrive ermöglicht das Metronix-spezifische Anwendungsprofil den unkomplizierten Zugriff auf alle Funktionen des Servoreglers. Fertige Funktionsbausteine und ein Beispielprojekt machen die Integration des smartServo in die Steuerung zu einem echten Kinderspiel. Auch die Klartext-Anzeige von Störungsmeldungen in der Steuerung vereinfacht die Erstinbetriebnahme erheblich, so dass die Maschine oder Anlage schneller einsatzbereit ist.
Geberschnittstellen
EnDat 2.2
Heidenhain-Geber mit EnDat-Interface besitzen einen seriellen Kommunikationskanal, über den der Servoregler mit dem Geber kommuniziert. Darüber werden alle relevanten Informationen aus dem elektronischen Typenschild des Gebers ausgelesen. Eine umständliche Parametrierung von Hand entfällt. Hat der verwendete Geber zudem ein EEPROM, können Motorinformationen im Geber gespeichert werden, so dass der Motor direkt an einem anderen Servoregler einsetzbar ist. Der smartServo BL 4000-C unterstützt Endat 2.2-Geber jeweils als Single- und auch als Multiturngeber.
HIPERFACE®
Ebenso wie die Heidenhain-Geber besitzen HIPERFACE-Geber einen Kommunikationskanal, über den der Servoregler mit dem Geber kommuniziert. Auch hier werden alle relevanten Informationen aus dem Geber ausgelesen. Ebenso können Motorinformationen im Geber gespeichert werden. Es werden alle gängigen HIPERFACE-Single- und Multiturngeber unterstützt.

HIPERFACE DSL®
Bei der Einkabeltechnik HIPERFACE DSL® wird das Gebersignal digitalisiert im Motorkabel mit übertragen. Dadurch kommt man mit einem Minimum an Verbindungsleitungen zwischen Servoregler und Motor aus. Selbstverständlich sind alle Features der HIPERFACE-Geber (Elektronisches Typenschild, Speichern im Geber) auch bei HIPERFACE DSL® verfügbar.

Analoge und digitale Inkrementalgeber
Das universelle Geberinterface unterstützt eine Vielzahl verschiedener Geber: Es werden sowohl analoge 1Vss-Signale als auch digitale Spursignale inklusive Referenzspur bzw. Nullimpuls unterstützt. Zur Kommutierung können digitale Hallsignale zusätzlich ausgewertet werden, zudem ist der Anschluss eines Fehlersignals möglich. Einer der Gebereingänge kann auch als Puls-Richtung-Eingang oder Vorwärts-Rückwärtszähl-Eingang verwendet werden.
FA-CODER® und Nikon A-Format
Auch zahlreiche Geber der beiden japanischen Hersteller Nikon und Tamagawa Seiki werden vom smartServo BL 4000-C direkt unterstützt.
Resolver
Selbstverständlich wird auch der Resolver als robuster und kostengünstiger Lagegeber vom smartServo BL 4000-C unterstützt.
Safety

Safetyfunktionen
Integrierte Sicherheit
Die integrierte funktionale Sicherheitstechnik STO „Safe Torque Off“ bietet die steuerungs- und antriebsseitigen Voraussetzungen zur optimalen Realisierung von Schutzfunktionen.
Die STO Funktion besitzt das Leistungsmerkmal "Erreichen der Funktion „Safe Torque Off“ (STO)". Mit einem geeigneten externen Sicherheitsschaltgerät und geeigneter Beschaltung des Servoreglers kann die Funktion "Sicherer Stopp 1" (SS1, Typ C) realisiert werden.
Funktionen
für sichere Abläufe
STO - Safe Torque Off (Sicher abgeschaltetes Moment)
Unterbrechung der Energiezufuhr an den Antrieb nach EN 61800-5-2. Diese Funktion stellt sicher, dass der Antrieb keine Energie mehr aufbringen kann.
SS1 - Safe Stop 1 (Sicherer Stopp 1)
Verzögern und sichere Momentabschaltung nach EN 61800-5-2.

Technische Daten
Technische Daten

Servoregler smartServo BL 4000-C Serie
schnell, schmal, smart

BL 4102-C

BL 4104-C

BL 4304-C

BL 4308-C

BL 4312-C

BL 4320-C

BL 4340-C

BL 4360W-C
Produktserie smartServo
Ein- und dreiphasige Servoregler mit Bluetooth
Um die extreme Leistungsfähigkeit des smartServo BL 4000-C Servoreglers zu visualisieren, haben wir ein Beispiel aus der Natur gewählt. Die Ameise kann Gegenständen bewegen, die ein Mehrfaches des eigenen Körpergewichts übersteigen. Genau wie der kompakte BL 4000-C, der z. B. eine Werkzeugmaschine, eine Verpackungsmaschine oder einen Roboter präzise, dynamisch und kontrolliert bewegt. Also ein wichtiger Baustein für Ihre zukünftigen und aktuellen Projekte. So wollen wir Ihre Ideen gemeinsam zu großen, neuen Projekten zusammenführen.
