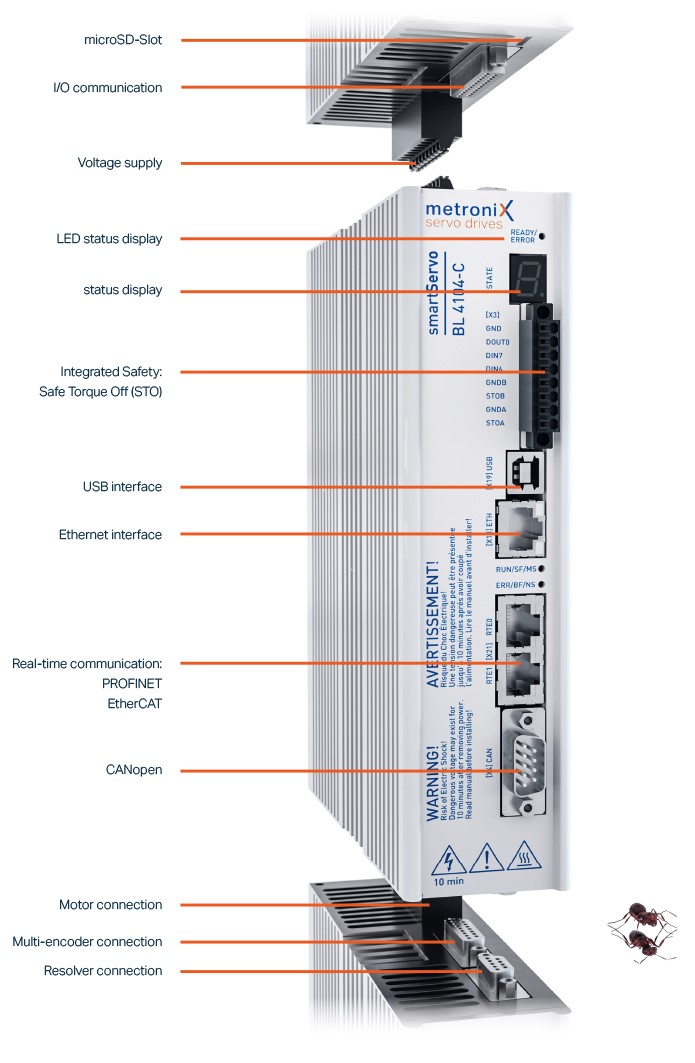
BL 4100-C
smartServo BL 4100-C
Single-phase servo drive with Bluetooth
- Highest performance and dynamics internal sampling time < 32 μs
- USB and Ethernet as parameterisation interfaces
- Fieldbus on board EtherCAT/PROFINET/CANopen
- Universal encoder evaluation HIPERFACE®,HIPERFACE DSL®, EnDat 2.2, resolver, digital and analogue incremental encoders
- Bluetooth integrated Query of the servo drive status via mobile phone or tablet PC
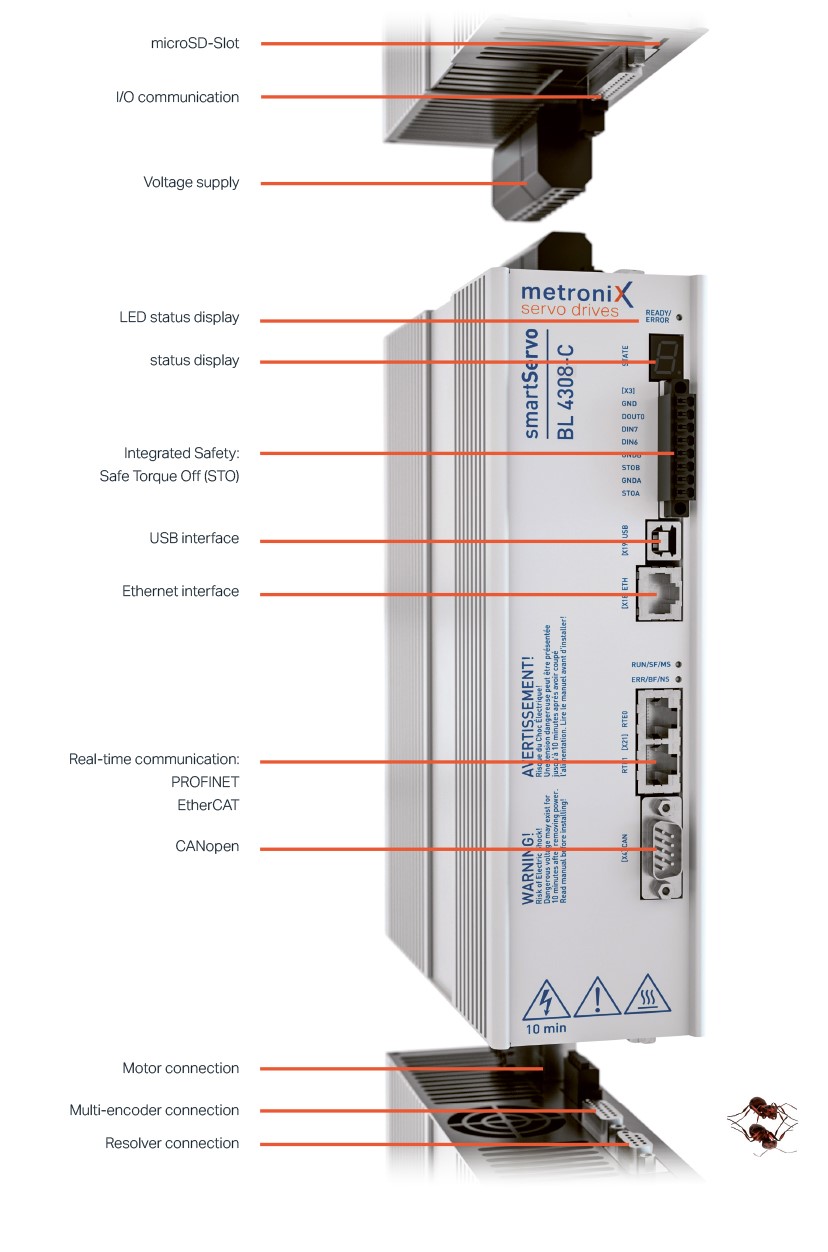
BL 4300-C
smartServo BL 4300-C
Three-phase servo drive with Bluetooth
- Highest performance and dynamics internal sampling time < 32 μs
- USB and Ethernet as parameterisation interfaces
- Fieldbus on board EtherCAT/PROFINET/CANopen
- Universal encoder evaluation HIPERFACE®,HIPERFACE DSL®, EnDat 2.2, resolver, digital and analogue incremental encoders
- Bluetooth integrated Query of the servo drive status via mobile phone or tablet PC

Technology functions
on board
Numerous integrated software functions make the smartServo BL-4000-C servo drives real all-rounders in drive technology.
The smartServo BL-4000-C servo drives not only support numerous motor types and all common position encoders directly, but also can be adapted very flexible to a variety of applications via simple parameterisation of the integrated technology functions. The high-precise evaluation of external signals in the drive allows shortest possible cycle times.
Positioning
Whether linear, jerk-limited or torque-limited: With the integrated positioning control every motion task can be easily realised.
Path program / Linking
All 256 positioning sets can be linked to solve complex positioning tasks without external control system. Furthermore, digital inputs allow situation-related branching.
Flying saw
By integrating a „flying saw“ into the drive, not only short cycle times, but also extremely high accuracies can be reached.
Electronic gear/ Synchronisation
The position-synchronous or speed- synchronous motion of various drives with variable gear ratios can be quickly parameterised via the software assistant
Linear motors
Special procedures for the determination of the commutation position and corresponding monitoring functions allow the operation of linear motors without commutation information.
Rotary table
For rotary table applications, several rotary axis modes are available. These can be combined with the cam disk and with the electronic gear.
Switching cams
Position trigger, rotor position trigger and switching cams in connection with the cam disk can be easily parametrised and connected to digital outputs.
Connectivity-Options
Universal interface variety
CANopen
The CANopen fieldbus system with the CiA 402 drive profile, which has been tried and tested for decades, is always on board. With the operating modes Profile Torque Mode, Profile Velocity Mode, Profile Position Mode, Homing Mode and Interpolated Position Mode, the servo drive can be used in a variety of different applications. A few hundred parameters enable the servo drive to be completely configured via CANopen.

Ethernet
The integrated Ethernet interface can be connected via a UDP / IP connection e.g. can be used for remote maintenance or as a fieldbus connection. A transfer of setpoints and actual values, an error analysis, the loading and saving of parameter sets, the setting of individual parameters and the display of values is possible via the oscilloscope function.

EtherCAT
All smartServo BL 4000-C have the Ethernet-based EtherCAT fieldbus system. With the CoE application protocol (CANopen over EtherCAT), all operating modes and parameters of CANopen can also be used under EtherCAT. In multi-axis applications, in the "Cyclic synchronous position" operating mode in connection with distributed clocks (DC), highly synchronous movements are achieved even at high cycle times, since the servo drives synchronize exactly with the external clock.
PROFINET
The Ethernet-based fieldbus system PROFINET is also already fundamentally integrated. Based on PROFIdrive, the Metronix-specific application profile enables uncomplicated access to all functions of the servo drive. Finished function blocks and a sample project make the integration of the smartServo into the control system a breeze. The plain text display of fault messages in the control system considerably simplifies commissioning, so that the machine or system is ready for use more quickly.
Encoder interfaces
EnDat 2.2
Heidenhain encoders with EnDat interface have a serial communication channel that is used for the communication between the servo drive and the encoder. Via this channel all relevant information is read out of the electronic nameplate of the encoder. This avoids a cumbersome manual parameterisation. If the used encoder also has an EEPROM, the motor information can be saved in the encoder so that the motor can be connected directly to another servo drive. The smartServo BL 4000-C supports EnDat 2.2 encoders, each as singleturn and multi-turn encoder.
HIPERFACE®
As well as the Heidenhain encoders, the HIPERFACE encoders have a serial communication channel that is used for the communication between the servo drive and the encoder. Here again all relevant information is read out of the encoder and motor information can be saved in the encoder. All common HIPERFACE single-turn and multi-turn encoders are supported..

HIPERFACE DSL®
The single-cable technique HIPERFACE DSL® transmits the digitalized encoder signal via the motor cable. Thus, a minimum of connecting lines between servo drive and motor is required. Of course, all features of the HIPERFACE encoders (electronic nameplate, information saving in the encoder) are also available in the HIPERFACE DSL® encoder.

Analogue and digital incremental encoders
The universal encoder interface supports a variety of different encoders. 1Vss signals are supported as well as digital track signals including homing tracks and index pulse. In addition to commutation, digital Hall signals can be evaluated and the determination of an error signal can be activated. One of the encoder inputs may also be used as pulse direction input or as forward-backward counting input.
FA-CODER® und Nikon A-Format
The smartServo BL 4000-C also directly supports numerous encoders from the two Japanese manufacturers Nikon and Tamagawa Seiki.
Resolver
Of course, the smartServo BL 4000-C also supports the resolver as a robust and costeffective position encoder.

Safety funktions
Integrated safety
The integrated functional safety technology provides the control-system- and drivespecific conditions for the optimal realisation of protective functions.
The STO function includes the feature "Realisation of the "Safe Torque Off" (STO) function". The "Safe Stop 1" (SS1, Type C) function can be realised with a suitable external safety relay and by suitable wiring of the servo drive.
Functions
for safe sequences
STO - Safe Torque Off
Disconnection of the energy supply to the drive according to EN 61800- 5-2. This safety function ensures that the drive is unable to deliver energy.
SS1 - Safe Stop 1
Deceleration and safe torque switch off in accordance with EN 61800-5-2.



BL 4102-C

BL 4104-C

BL 4304-C

BL 4308-C

BL 4312-C

BL 4320-C

BL 4340-C

BL 4360W-C
smartServo product series
Single and three-phase servo drives with Bluetooth
To visualise the extreme performance of the servo drive smartServo BL 4000-C, we have chosen an example from nature: The ant can move objects that exceed its own body weight by a multiple. Just like the compact BL 4000-C, that moves for example a machine tool, a packaging machine or a robot precisely, dynamically and controlled. This is an important component for your future and current projects. In this way, together with you, we want to sum up your ideas to big, new projects.
